智能驾驶-汽车软件产业方兴未艾
传统分布式 EE 架构制约汽车智能化升级,向域架构、中央计算架构演进:传统的汽车包含了 100 多个 ECU,且因为算法嵌入了 MCU 芯片,致使 MCU 与功能算法高度耦合。而传统的面向信号的软件架构也限制了软件升级,此时主机厂若想在汽车上增加某一功能,就必须重新规划部署全车 ECU,并将 ECU 退回给供应商,让供应商重新编写底层代码。分布式架构使得汽车软硬件紧密耦合,随着汽车智能化升级需求的快速增长,ECU 数量过多导致算力浪费和功能增加困难、车型研发周期变长、通讯效率低下、无法通过 OTA 更新升级软件等弊病逐渐暴露,“牵一发而动全身”的问题大大阻碍了汽车智能化进程。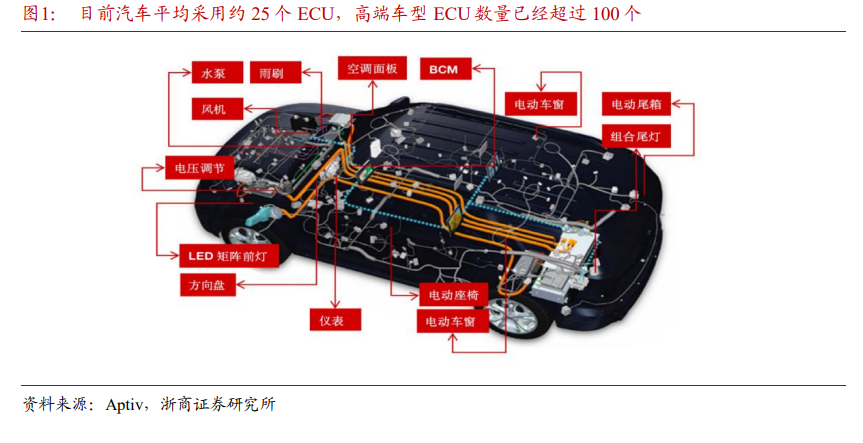
SOA 架构推动实现汽车软硬件解耦: 汽车电子电气架构的变化也直接带动了开发模式的转变,转为面向服务架构(Service-Oriented Architecture,简称 SOA)的模式。SOA架构本质是将原本分散的 ECU 及其对应的软件功能模块化、标准化,使得各个应用区域相互解耦。原先的面向信号架构不具备灵活性和扩展性、升级和移植成本高,无法满足当前汽车复杂性的提升。借鉴 IT 行业发展经验,面向服务架构势必将引导汽车硬软件进一步解耦和标准化,实现应用层功能在不同车型、硬件平台、操作系统上复用,最终实现“牵一发而不动全身”,从开发层面促进硬软件更快速发展。
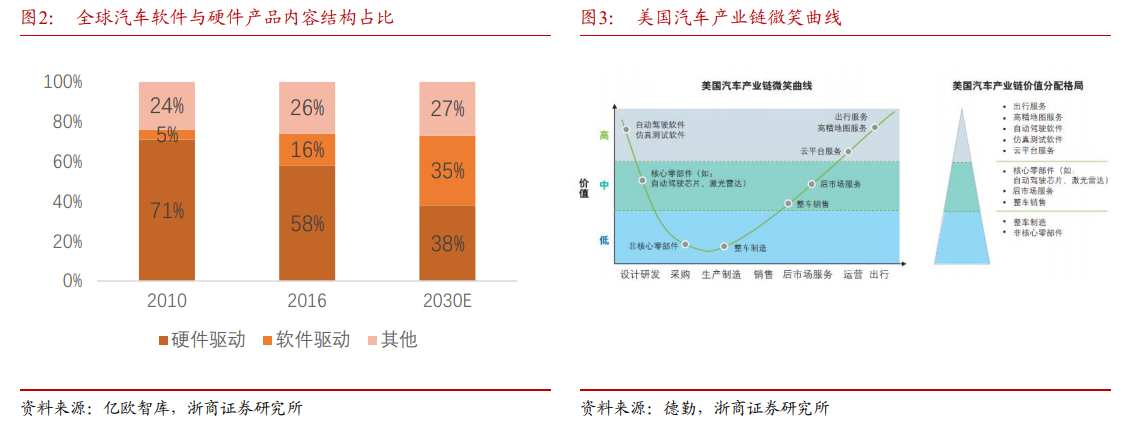
汽车软件更新周期远短于硬件,软件成为造车新壁垒:软硬件解耦之后,主机厂能够把软件功能的更新与车型的更新分离开来,消费者不再需要依赖硬件更新/更换车辆来升级功能,仅凭软件的迭代即可提升车辆功能从而满足自身所需。原本汽车的硬件开发是 5 年一个周期,5 年一个车型,3 年一个小改,一旦车型锁定之后基本就无法改动;而软件更新周期非常快,可能三个月就需要更新一次,这与汽车硬件长周期的更新形成了鲜明对比。