机器人核心零部件,国产替代加速进行时
工业机器人:面向工业领域的多关节机械手或多自由度机器人。自动执行工作的机械装臵,靠自身动力和控制能力来高精度地重复执行特定工作。体积较大,相对而言比较危险,一般被限制在特定的工作区域独立工作。工业机器人产业链上游为三大核心零部件(减速器、伺服、控制器),中游为工业机器人(多关节机器人、SCARA 平面多关节机器人、delta 并联机器人、直角坐标机器人等),下游系统集成应用领域(焊接、装卸、装配、喷涂、上下料等),主要服务汽车、电子、金属、化学制品和食品等对自动化、智能化需求较高的终端行业。
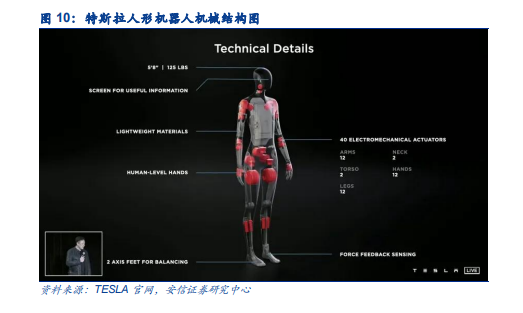
人形机器人和服务机器人最大的区别在于人形机器人需要保持平衡。普通服务机器人有底盘,用轮式驱动,不存在摔倒问题,只需要按照设定轨迹移动,并能实现一定程度的爬坡即可;人形机器人比服务机器人高度更高,需要靠双足行走,既要走得稳,还要走得快,并需要适应不同的地面。由于结构更接近人形,每个关节受力更加复杂,对减速器负载和电机响应速度要求更高。
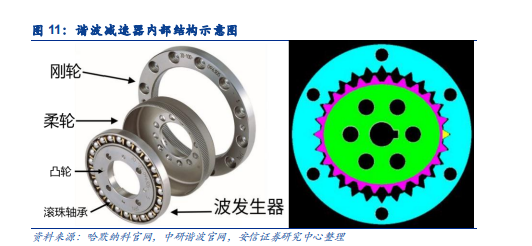
谐波减速器由波发生器、柔轮和刚轮三部分构成。①波发生器:图示绿色椭圆形部分,中间是凸轮,外圈是滚珠轴承,其内圈固定在凸轮上,外圈通过滚珠发生弹性形变。②柔轮:图示粉红色部分,使用柔性金属材料制成,外圈有齿。③刚轮:图示青色部分,使用刚性材料制成,内圈有齿。三部分可任意固定一个,其余一个主动、一个从动,实现减速或增速;也可变换成两个输入,一个输出,组成差动传动。